压缩感知加速
为提升压缩感知重建算法的实际性能,项目在多个层面进行了优化。源代码使用多个worker进行处理,实际运行时每个worker都会占满整个CPU,经过计算,平均到每个CPU上每秒可以处理23个8维数据点,有时候遇到数据求解更为复杂,速度会更慢。因此,我们对压缩感知算法进行了优化。
首先,核心计算流程采用了 numpy 库进行矩阵运算加速,并对求解问题的结构进行了重构,显著减少了冗余计算,整体平均加速达到 6.2 倍。
性能观测
运行profiler后发现,程序主要时间集中在 lesinn算法、sample采样、以及凸优化求解上,在32维数据上大概占比 50%、10%、35%。
lesinn算法优化
我们使用cuda重写了lesinn,但是发现由于检测窗口较小,数据传输在GPU和CPU开销较大,实际加速比只有2.1左右。
我们注意到,lesinn算法中存在冗余计算。我们需要计算输入数据 个数据点的相似度分数。对于数据点 A,需要从输入数据以及历史数据中随机选择 个点,计算 A 与这些点最小欧式距离,取倒数作为相似度分数,这个采样过程发生次,存在重复计算。
因此我们使用查找表算法进行优化。
# 1. 批量计算所有 similarity
similarity_matrix = np.zeros((m, n))
for i in range(m):
similarity_matrix[i, :] = batch_similarity(incoming_data[i], all_data)
# 2. 采样索引 shape=(m, t, phi)
samples = np.array([
[np.random.choice(n, size=phi, replace=False) for _ in range(t)]
for _ in range(m)
]) # shape=(m, t, phi)
# 3. 计算每个点的score
data_score = np.zeros((m,))
for i in range(m):
score = 0
for j in range(t):
nn_sim = np.max(similarity_matrix[i, samples[i, j]])
score += nn_sim
if score:
data_score[i] = t / score
return data_score
查找表算法(lookup table),用于加速批量相似度计算。其核心思想是先批量预计算所有数据点之间的相似度,存入查找表(similarity_matrix),后续采样和分数计算直接查表,无需重复计算。
第一步,通过循环将每个 incoming_data 与所有 all_data(历史数据加上输入数据) 的相似度批量计算出来,存入二维相似矩阵,避免后续重复计算。 第二步,samples 随机采样,得到每个数据点的采样索引(哪些数据需要对比)。 第三步,分数计算时,直接用 similarity_matrix[i, samples[i, j]] 查表,取最大值,无需再次计算相似度,极大减少了冗余运算。 查找表算法的优势在于:相似度只算一次,后续采样和分数统计都直接查表,提升了整体计算效率,尤其适合大规模批量处理场景。
sample采样加速
这里的加速主要体现在采样过程的向量化:
# 源代码
while step <= 1:
for j in range(m):
c = su_center[j]
if np.abs(c - step) > 3 * sigma:
continue
p = rho * np.exp(np.square((c - step) / sigma) / -2)
if random.random() < p:
sample_mat[j][y - 1] += 1
step += each_step
while step > t[y] and y < n:
y += 1
for row in range(m):
# 权重归一化
sample_mat[row] /= np.sum(sample_mat[row])
sample_mat = np.asmatrix(sample_mat)
return sample_mat, su_timestamp
#优化后的代码
while step <= 1:
# 向量化所有采样单元
diff = np.abs(su_center - step)
mask = diff <= 3 * sigma
if np.any(mask):
p = rho * np.exp(-0.5 * ((diff[mask] / sigma) ** 2))
rand = np.random.rand(np.sum(mask))
idx = np.where(mask)[0]
for k, j in enumerate(idx):
if rand[k] < p[k]:
sample_mat[j][y - 1] += 1
step += each_step
while step > t[y] and y < n:
y += 1
# 权重归一化
sample_mat /= sample_mat.sum(axis=1, keepdims=True)
return np.asmatrix(sample_mat), su_timestamp
原始实现用两层 for 循环,逐个采样单元和采样步长判断是否采样,效率较低。 现有实现(实际代码)diff = np.abs(su_center - step)一次性计算所有采样单元中心与当前步长的距离(向量运算)。mask = diff <= 3 * sigma一次性筛选所有满足条件的采样单元。p = rho * np.exp(-0.5 * ((diff[mask] / sigma) ** 2))一次性计算所有采样概率)。rand = np.random.rand(np.sum(mask))一次性生成所有采样单元的随机数。
凸优化求解加速
# do L1 optimization
vx = cvx.Variable(d * n)
objective = cvx.Minimize(cvx.norm(vx, 1))
constraints = [transform_mat @ vx == b]
prob = cvx.Problem(objective, constraints)
prob.solve(solver='OSQP',verbose=False,enforce_dpp=True) # 可以选择 OSQP、SCS、CLARABEL
在凸优化求解代码中,问题被转化为如下形式:
OSQP 将 L1 最小化问题和线性约束转化为标准二次凸优化形式:
其中为单位矩阵, 为全0向量,因为约束为等式约束,因此 均取 。
但是注意到,这里面引入了二次项系数,因此求解效率不够高。
我们对比了 OSQP 求解器与 SCS求解器、ClArabel 求解器,后两种求解器将L1 最小化问题转换成 LP 问题。OSQP 是一个专门用于求解二次规划(QP)问题的高效求解器,支持带有线性约束的目标函数。它采用 ADMM 算法,能够快速处理大规模稀疏问题。SCS 是一个通用的锥规划(Conic Programming)求解器,支持线性规划(LP)、二次锥规划(SOCP)、半正定规划(SDP)等多种问题。ClArabel 是一个专门用于线性规划(LP)和二次规划(QP)问题的求解器,适合高维稀疏问题,它使用rust编写,因而速度比较快。
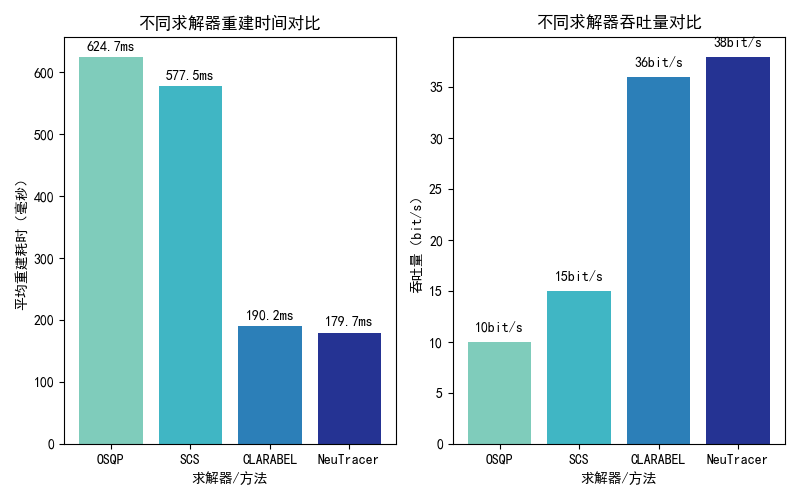
我们显式地将问题转换为LP问题:
def compressed_sensing_direct(transform_mat, b):
"""
直接展开法求解 min ‖x‖₁ s.t. transform_mat @ x == b
完全替代 CVXPY 的解决方案
"""
m, n = transform_mat.shape
# 1. 构造线性规划参数
# 目标函数: min [0,..0, 1,..1] · [x; t]
c = np.hstack([np.zeros(n), np.ones(n)])
# 等式约束: transform_mat @ x = b → [transform_mat | 0] [x; t] = b
A_eq = np.hstack([transform_mat, np.zeros((m, n))])
# 不等式约束: -t ≤ x ≤ t →
A_ub = np.vstack([
np.hstack([ np.eye(n), -np.eye(n)]), # x_i - t_i ≤ 0
np.hstack([-np.eye(n), -np.eye(n)]) # -x_i - t_i ≤ 0
])
b_ub = np.zeros(2 * n)
# 2. 求解线性规划 - 使用高效HiGHS求解器
start_time = time.time()
res = linprog(c, A_ub=A_ub, b_ub=b_ub, A_eq=A_eq, b_eq=b,
method='highs', bounds=(None, None),options={"disp": False})
我们实现了压缩感知重建问题的线性规划直接展开法,用于求解带有L1范数约束的稀疏重建问题。其核心思想是将原始的L1范数最小化问题转化为标准线性规划(LP)形式,便于使用高效的LP求解器(如HiGHS)进行求解。linprog 是 SciPy 库中用于线性规划(Linear Programming)求解的函数。它可以高效地解决标准线性规划问题,包括目标函数最小化和线性约束。
原问题
展开成
这种方法完全替代了CVXPY的L1范数最小化方案,计算效率高,适合大规模稀疏重建场景。大概能提升3-4倍的求解速度。同时保证求解精度。经过测试,在2万多个数据点上仅有4个点误差比较大,因为OSQP会经常出现采样率不够导致问题无法求解并自动提高采样率,而LP问题无法做到。 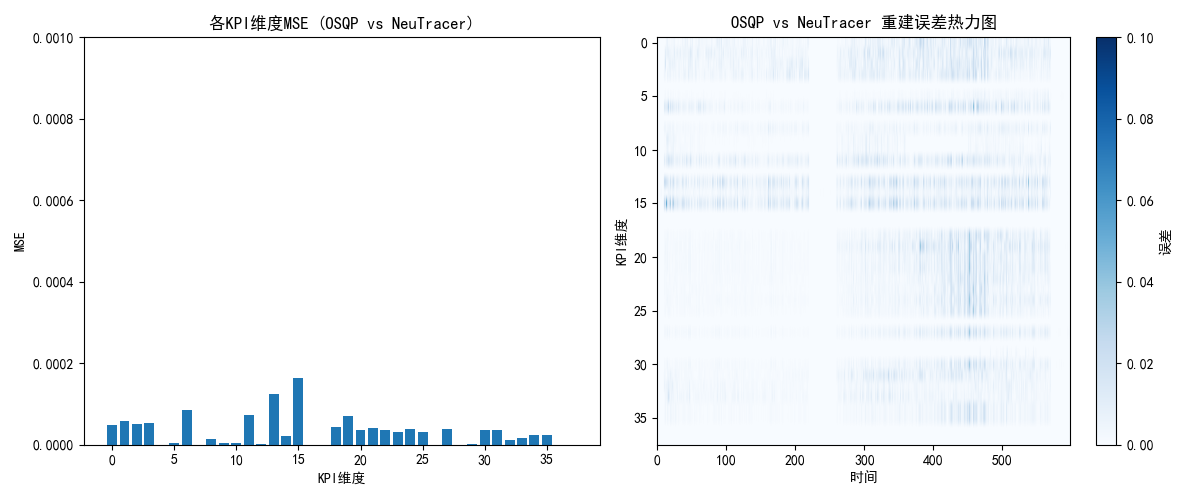 如图,求解器误差较小。
如图,求解器误差较小。